Herramienta para la simulación del control visual de un robot
Realizado por: Javier Martínez Gusano
Destinatario: Trabajo Final de Master. Master Oficial en Automática y Robótica. Universidad de Alicante.
Año: 2013
Duración del proyecto: 1 mes

Pantalla principal de la herramienta
Punto de partida
El presente conjunto de herramientas se desarrolló a partir de los conocimientos adquiridos en el Master Oficial en Automática y Robótica de la Universidad de Alicante como proyecto final de master. El objetivo era proporcionar al usuario una aplicación que permitiese modelar un brazo robótico de N grados de libertad y posteriormente efectuar simulaciones de control visual bajo Simulink de un modo práctico y sencillo.
Requisitos Hardware
Debido a que esta aplicación es una herramienta de simulación de control visual, no será necesario utilizar ningún elemento hardware. Únicamente, se deberá tener en cuenta los requisitos mínimos necesarios para el correcto funcionamiento de Matlab.
Requisitos Software
Como aplicación principal, utilizaremos Matlab 2013, Simulink y las toolbox para Matlab siguientes:
Descripción del paquete de herramientas
El acceso a cada una de las utilidades del paquete desarrollado en este proyecto se realiza a partir de la ventana principal (ver imagen superior del blog).

Vemos que existen cuatro grupos de botones cuya funcionalidad explicaré a grandes rasgos a continuación:

Todos los cambios que realiza el usuario en la interfaz de control se reflejan inmediatamente en las gráficas tridimensionales que muestran al robot o así como en el gráfico que muestra lo que la webcam situada en el extremo del robot está capturando desde esa posición.

Diagrama de las herramientas desarrolladas
Vemos que existen cuatro grupos de botones cuya funcionalidad explicaré a grandes rasgos a continuación:
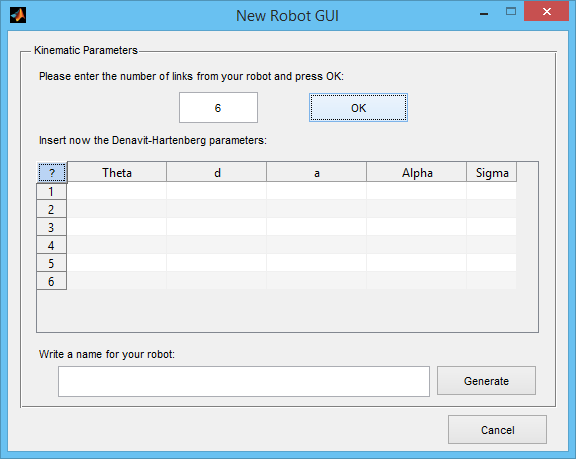
- Create Robot: Permite definir, importar y/o exportar un brazo robótico para poder efectuar simulaciones con el mismo.

- Create Camera: Estos botones sirven para crear, importar y/o exportar una cámara virtual que se situará en el extremo del robot para poder realizar simulaciones de control visual. Un cuarto botón nos permite definir un patrón de puntos que situaremos en el espacio tridimensional y que utilizaremos como referencia para que el robot efectúe un control visual.


- Positions & Movements: Permite definir posiciones, crear trayectorias.. de un brazo robótico.

- Visual Robot Control: Permite realizar simulaciones de control visual para el brazo robótico.




Todos los cambios que realiza el usuario en la interfaz de control se reflejan inmediatamente en las gráficas tridimensionales que muestran al robot o así como en el gráfico que muestra lo que la webcam situada en el extremo del robot está capturando desde esa posición.
Funcionamiento de la aplicación principal
Esta utilidad se caracteriza por permitir al usuario el control total de un brazo robótico así como del espacio de simulación. Podemos realizar movimientos relativos y articulares del brazo robótico para posicionarlo en el lugar que deseemos. Dichos cambios se reflejarán en tiempo real en la GUI de la herramienta mostrando al usuario el estado del brazo robótico y lo que la cámara estaría capturando desde ese lugar.
Una vez definidos el punto de partida del brazo robótico así como el patrón de puntos que deseamos que la cámara capture, podemos llamar al algoritmo de control visual de Simulink para que calcule en tiempo real las velocidades articulares que se han de aplicar en el robot para conseguir la posición final deseada. En este video podemos ver dicha simulación:
Una vez definidos el punto de partida del brazo robótico así como el patrón de puntos que deseamos que la cámara capture, podemos llamar al algoritmo de control visual de Simulink para que calcule en tiempo real las velocidades articulares que se han de aplicar en el robot para conseguir la posición final deseada. En este video podemos ver dicha simulación:
Material disponible para descarga
A continuación pueden descargar la memoria del trabajo fin de master haciendo clic aquí. En ella encontrará información relativa al uso del programa desarrollado en este proyecto así como ejemplos de aplicación con diferentes modelos de robots reales.
No hay comentarios:
Publicar un comentario